
Czas trwania: 2014 - obecnie
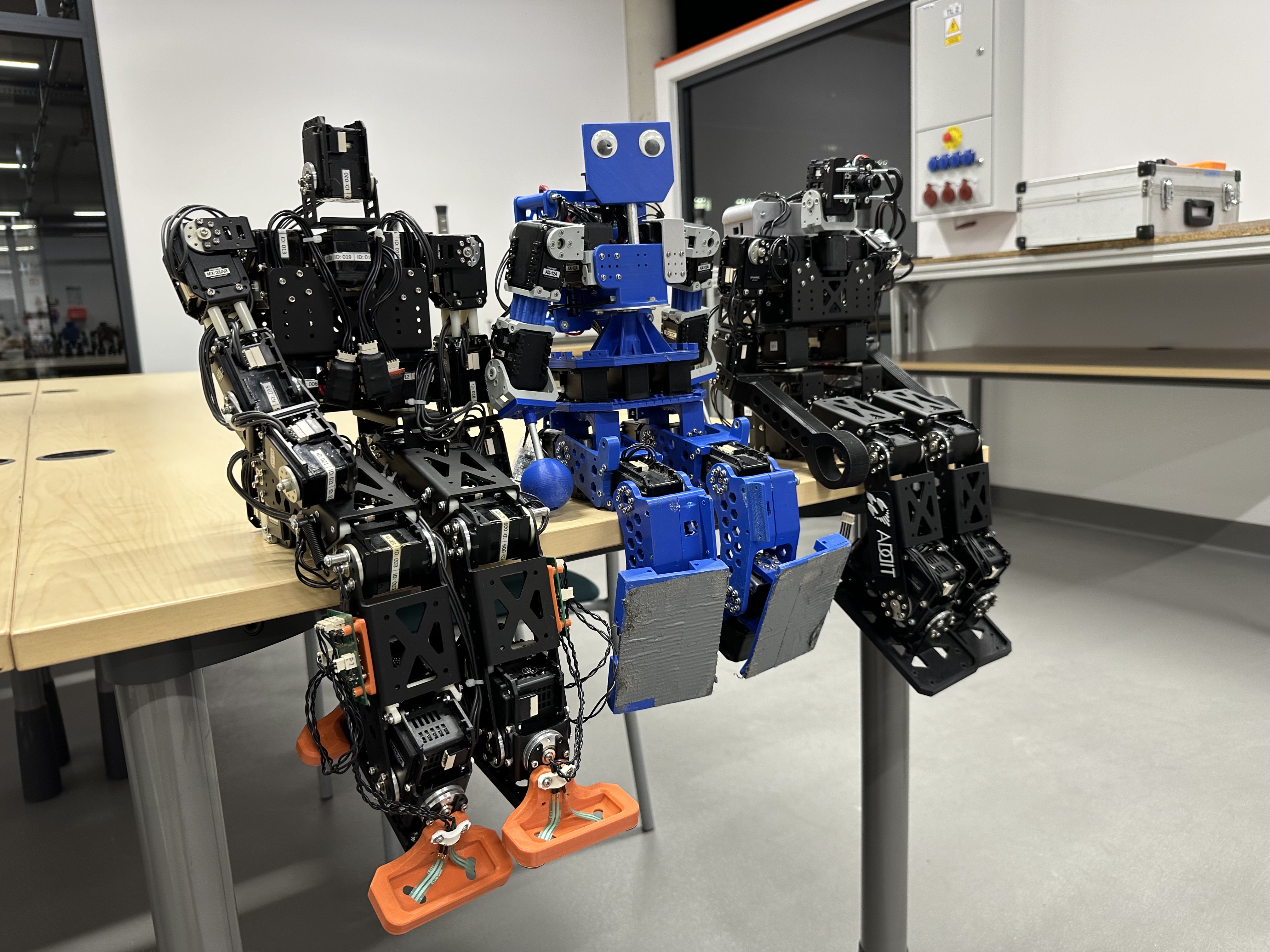
Jesteśmy sekcją zajmującą się robotami kroczącymi, czyli takimi konstrukcjami które w wyglądzie i poruszaniu się przypominają człowieka. Nasz zespół składa się z ponad 20 studentów i studentek PW prężnie rozwijających równolegle 4 projekty konkurujące na międzynarodowych zawodach.
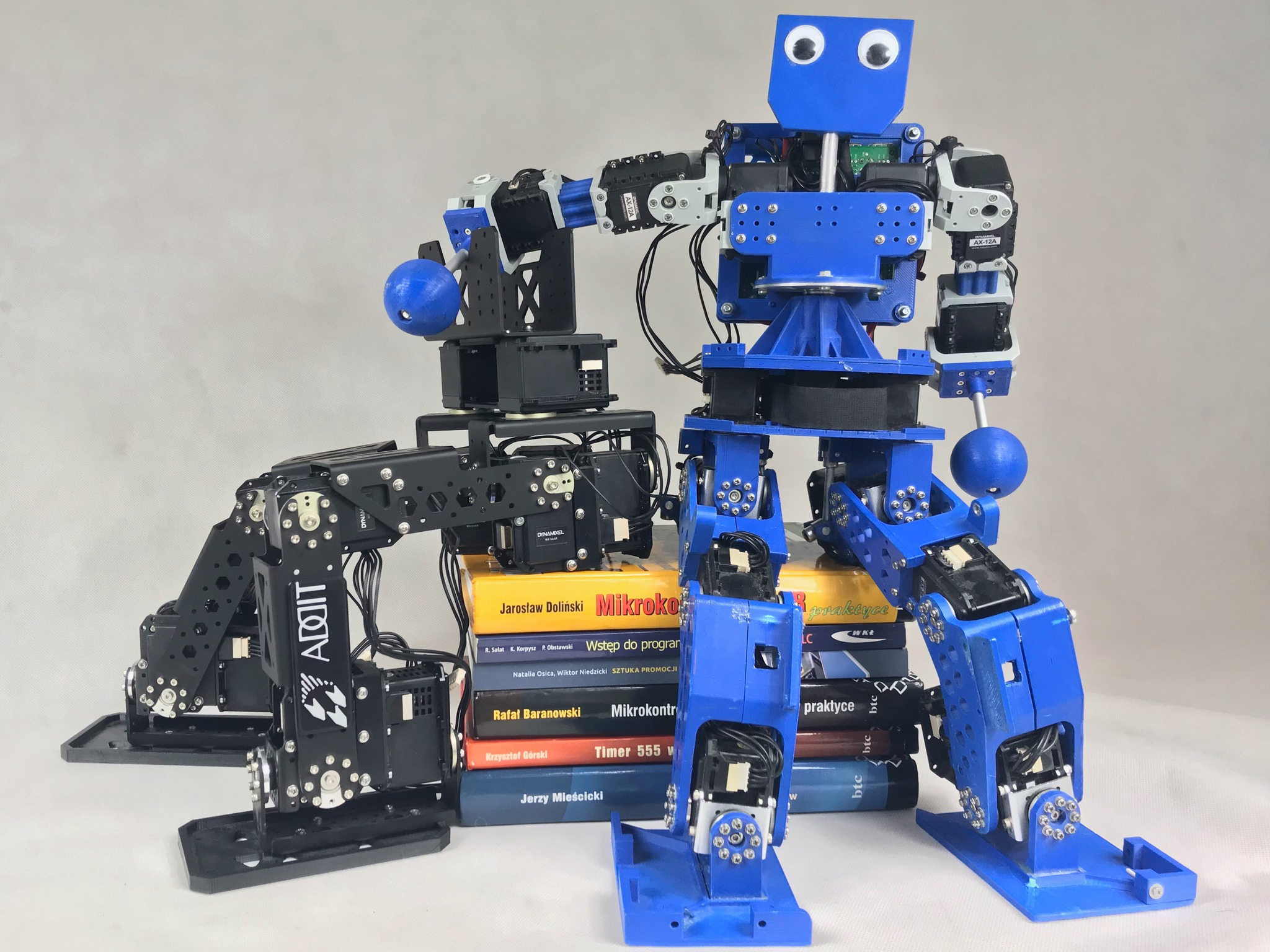
Melson - najmniejszy z naszych robotów – powstał jako pierwsza konstrukcja naszego Koła Naukowego mająca za zadanie przetarcie szlaków w dziedzinie humanoidalnych robotów kroczących. Konstrukcja z elementów wytworzonych na drukarkach 3D oraz 19 wysokiej klasy serwonapędów pozwala mu naśladować ruchy człowieka. Jako kołowy pionier w konkursach robotycznych stoczył niejeden pojedynek na ringu SUMO, jak i popisał się na zawodach “freestyle”. Jako dojrzały projekt stanowi świetny wstęp dla aspirujących robotyków.
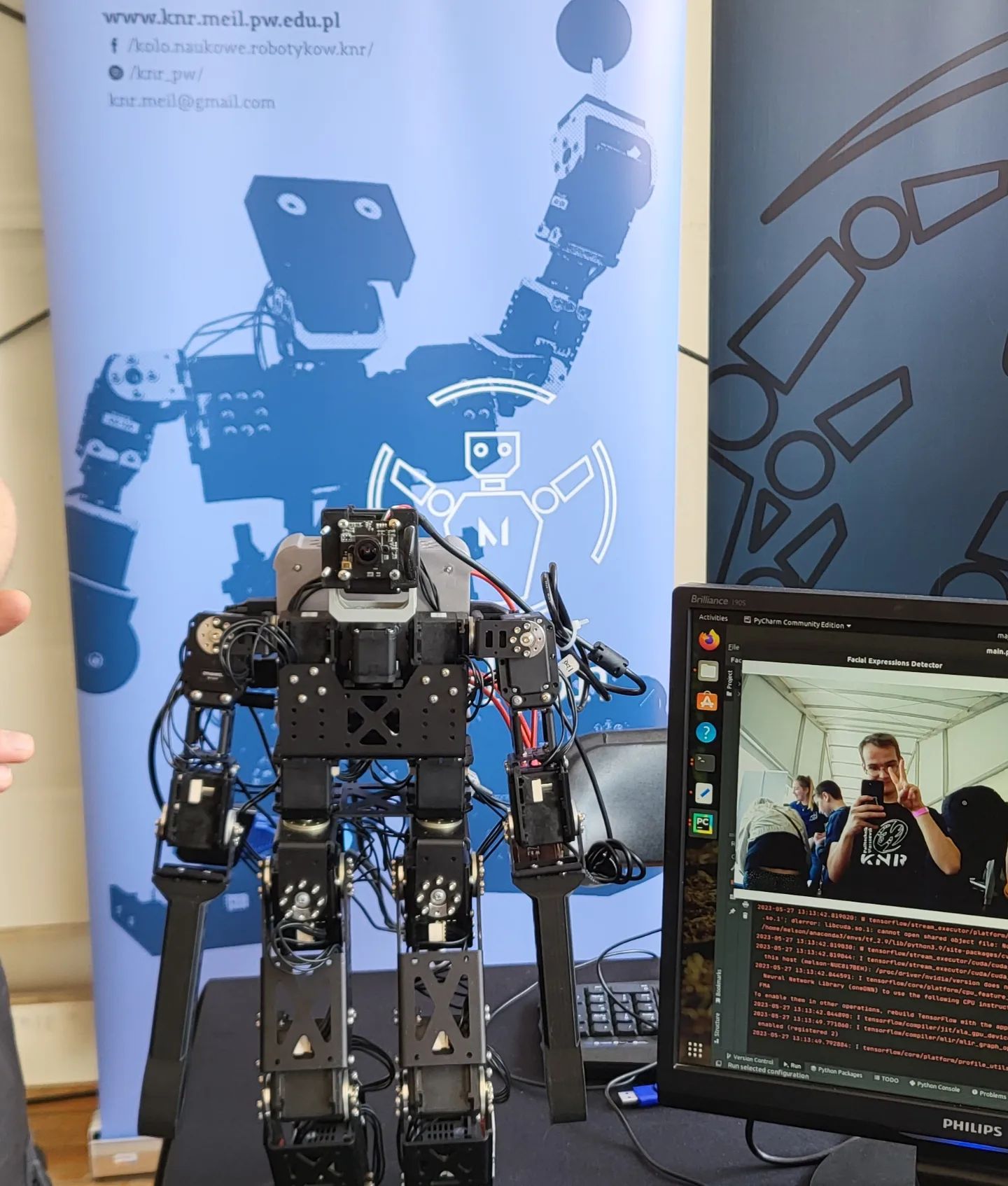
Melania – młodsza siostra Melsona – jest to robot, którego konstrukcja oparta jest na giętych blaszkach aluminiowych. Stanowi swego rodzaju ewolucję naszego pierwszego robota dzięki wytrzymalszej konstrukcji, mocniejszym napędom i mocniejszej jednostce obliczeniowej. Uzbrojona w kamerę do rozpoznawania twarzy potrafi rozpoznawać emocje człowieka na podstawie jego mimiki, jak i poprowadzić z nim konwersacje.
 |  |
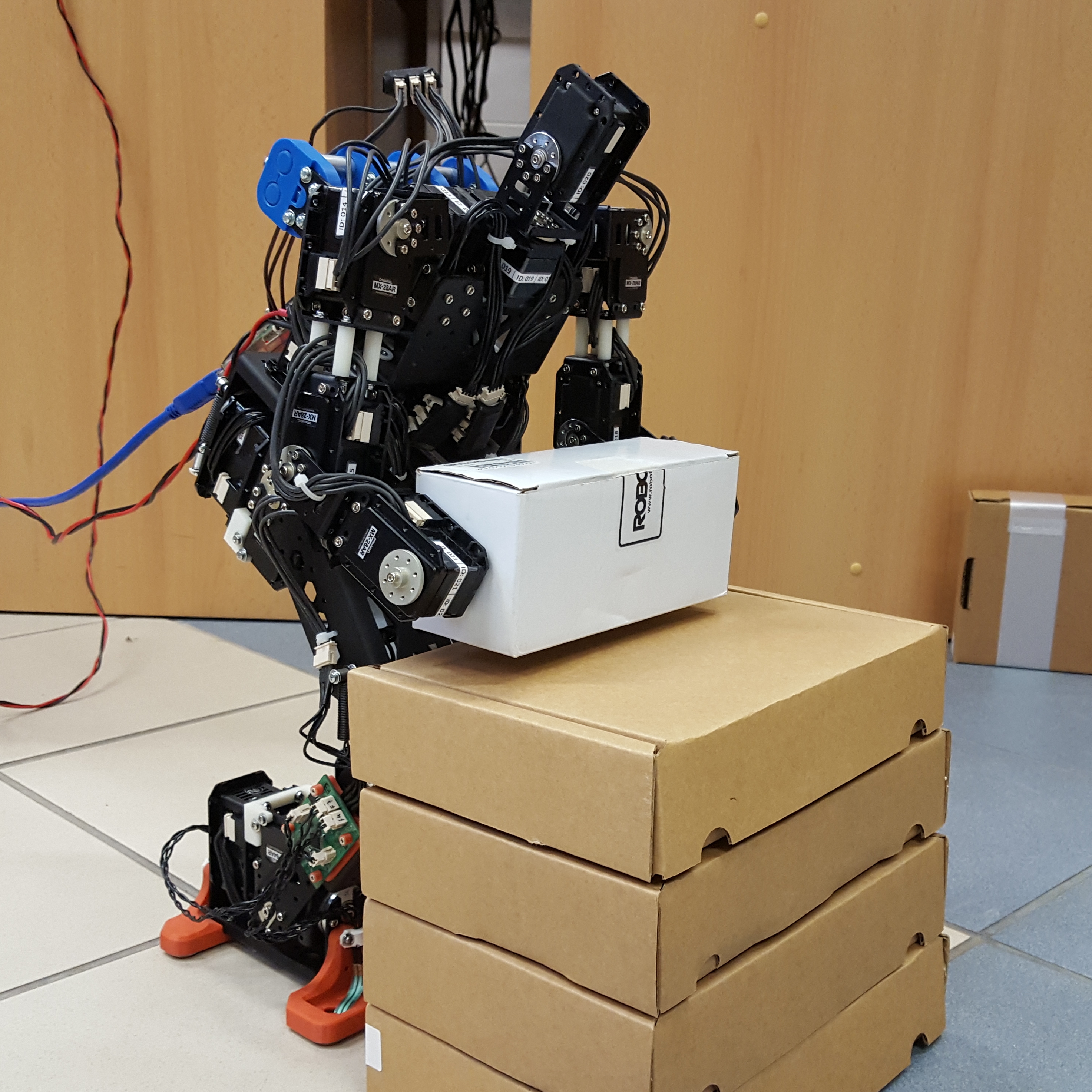
Melchior – nasz nowy robot – od niedawna znajdujący się w przestrzeni Koła Naukowego Humanoid, o budowie podobnej do Melanii. W swoich stopach posiada czujniki nacisku, dzięki którym nasz zespół bada różnego rodzaju chód uzyskany przez odwrotną kinematykę czy nawet uczenie maszynowe.
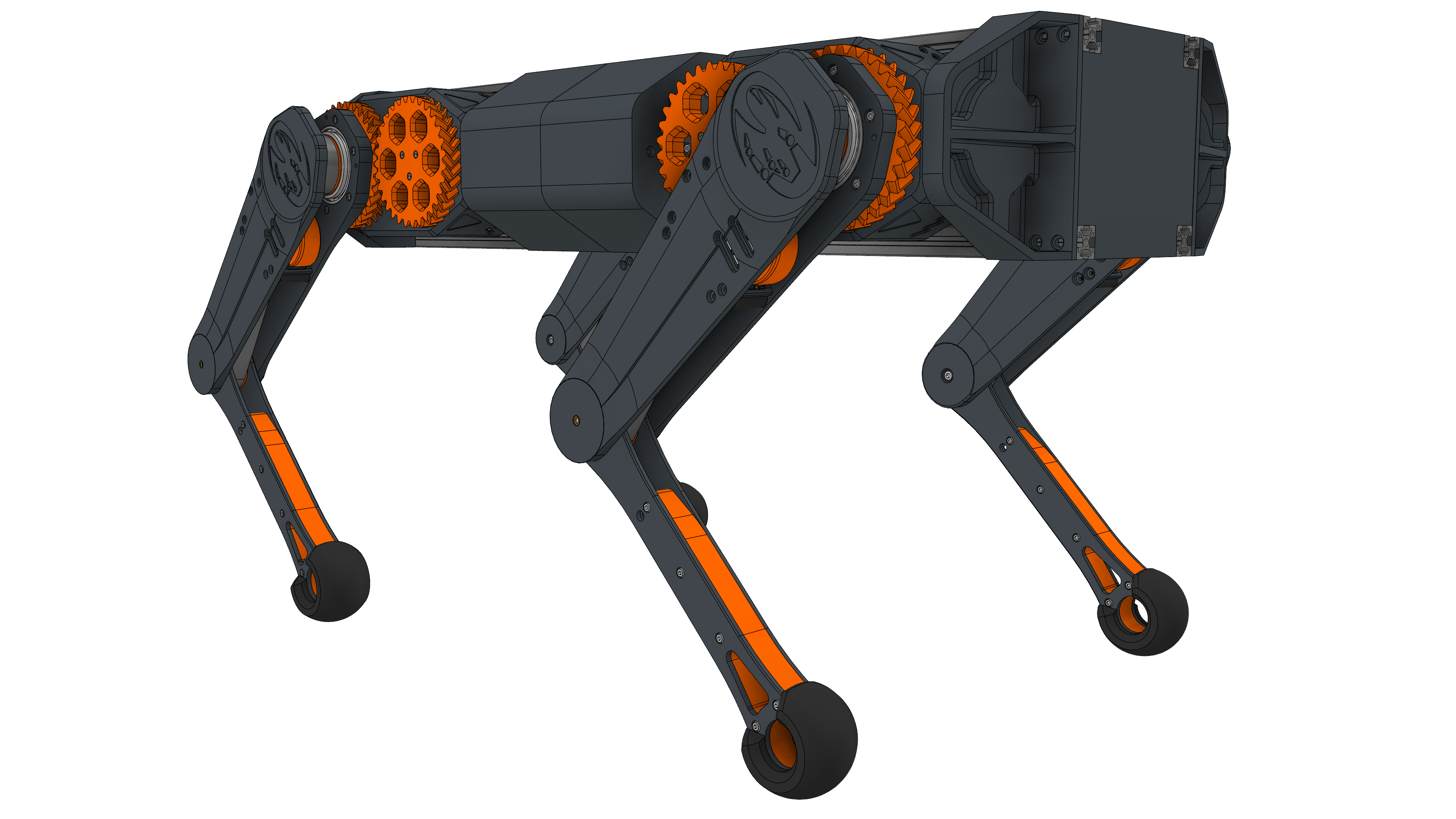
Meldog – najlepszy przyjaciel każdego humanoida – poszerzenie “repertuaru” naszego zespołu o roboty czteronożne, które od kilku lat cieszą się zainteresowaniem na zachodzie. Jest to nasz największy i najzuchwalszy do tej pory projekt. Konstrukcja robota w tej skali wymagała użycia autorskich jednostek napędowych opartych na silnikach BLDC i przekładni planetarnych. W obecnej fazie dogłębnie testujemy pojedynczą kończynę robota, ale myślami jesteśmy już przy realizacji całego czteronoga.
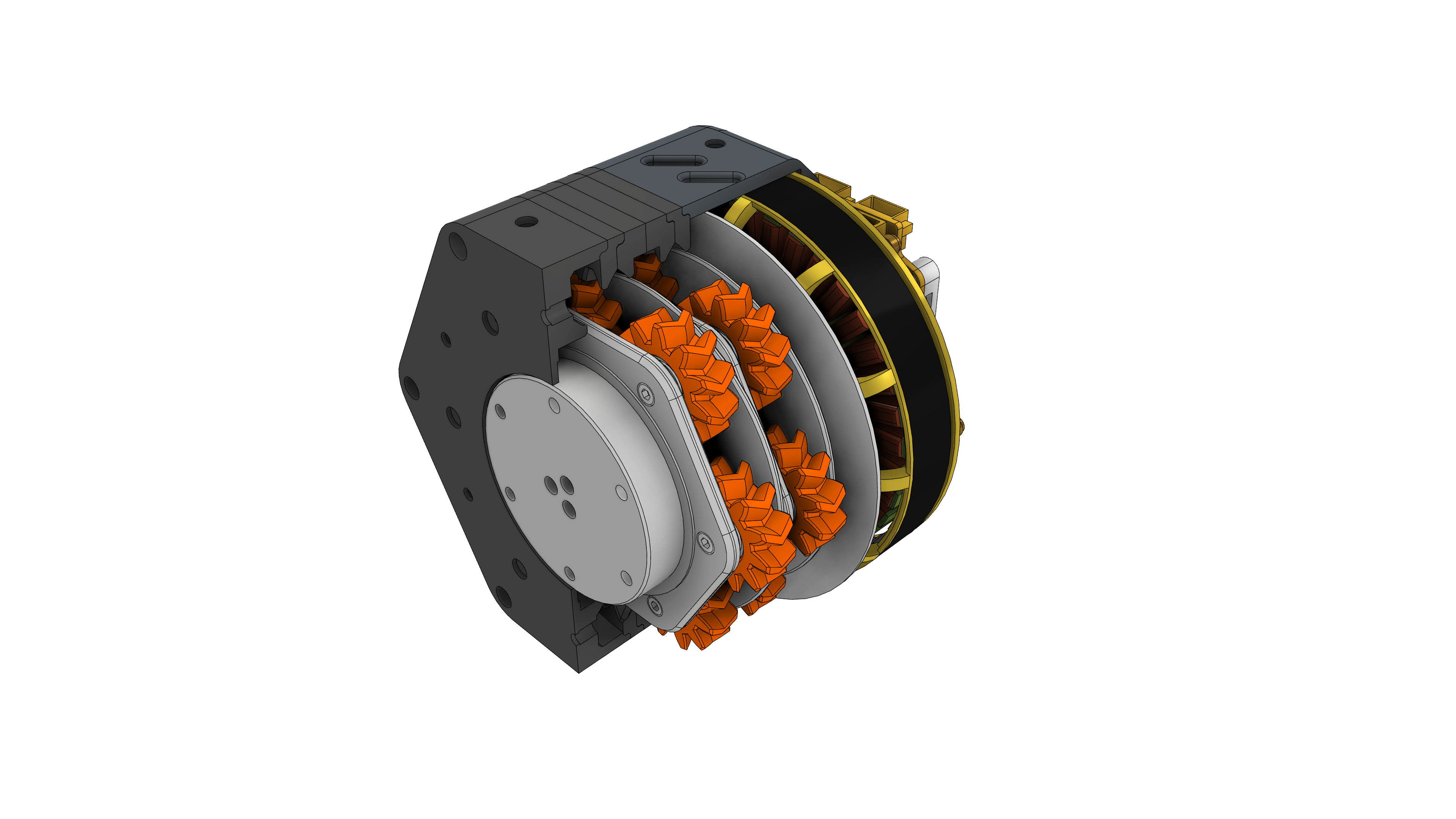 |  |
Można nas znaleźć na każdym kroku! Mamy za sobą wystąpienia na międzynarodowym zawodach RoboChallange w Rumunii, gdzie zajęliśmy 1 miejsce w kategorii „Humanoid Robot”, zawodach Sumo Challange w Łodzi, gdzie zajęliśmy 1 miejsce w kategorii „Humanoid Sprint”, zawodach RoboCup, gdzie można było zobaczyć nasze konstrukcje grające w piłkę nożną, zawodach Robomotion w Katowicach i wiele, wiele więcej. Ponadto, pojawiamy się na wszelkich wydarzeniach popularnonaukowych, gdzie pokazujemy wszystkim naszą prace i zachęcamy najmłodszych do zainteresowania się nauką. Można nas spotkać na Pikniku Naukowym, Nocy w Instytucie Lotnictwa oraz Dniach Otwartych Politechniki Warszawskiej. Opowiadaliśmy również o naszych robotach w programach telewizyjnych oraz radiu.

Poza zdobytymi doświadczeniami, projekty realizowane przez zespół pracujący nad robotami kroczącymi przyniosły również efekty naukowe. W ich ramach powstało min. kilka prac dyplomowych i publikacji.
Prace dyplomowe:
Publikacje: