Czas trwania: 2018.12 - 2023
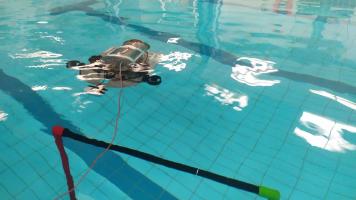
OKOŃ to projekt robotycznej łodzi podwodnej zdolnej do pracy zdalnej, sterowanej przez operatora na brzegu, a także do wykonywania zadań pod powierzchnią wody autonomicznie (samodzielnie bez komunikacji z człowiekiem). Prace nad tym urządzeniem trwały od grudnia 2018 roku, a naszym głównym celem było wzięcie udziału w największych międzynarodowych zawodach konstrukcji tego typu – Singapore AUV Challenge.

W latach 2018 – 2020 rozwijaliśmy pierwszą wersję robota. OKOŃ V1 był tanim robotem budowanym głównie z pozostałości po innych konstrukcjach rozwijanych w Kole Naukowym Robotyków. Mimo to projekt rozwijał się prężnie i posiadał kilka innowacyjnych rozwiązań takich jak mini-torpedy w dwóch wariantach (z pocisku CO2 oraz z silnikiem elektrycznym), chwytak bębnowy do pozyskiwania piłek z dna basenu czy też rozbudowany symulator pracy pod wodą (rozwinięty pod koniec istnienia pierwszej wersji robota). W 2020 roku zespół OKOŃ pomyślnie zakwalifikował się na wymarzone zawody AUV Singpore Challenge jak również na inne prestiżowe zawody np. International SeaPerch Challenge czy też RoboSub. Co więcej zespół otrzymał duże dofinansowanie z Ministerstwa Nauki i Szkolnictwa Wyższego z programu „Najlepsi z Najlepszych 4.0” co gwarantowało nam wyjazd do Singapuru i Stanów Zjednoczonych na prestiżowe zawody. Niestety pandemia COVID-19 pokrzyżowała nasze plany, a wszystkie zawody zostały odwołane. To nieco ostudziło nasz entuzjazm, ale prace nad robotem wcale nie ustały.
W tym momencie pomyśleliśmy o rozpoczęciu prac nad autorskim systemem symulacyjnym, który pozwoli na dalszy rozwój robota i testowanie jego podsystemów bez konieczności pracy na basenie. W tym samym czasie zgłosiliśmy dotychczasową konstrukcję do VI edycji Konkursu Konstrukcji Studenckich KOKOS. Nasza łódź podwodna została doceniona w kategorii Smart Robots, w której zajęliśmy pierwsze miejsce.

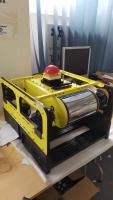
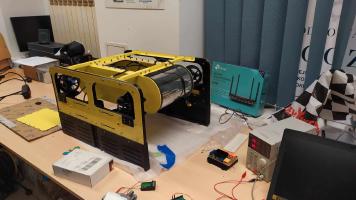
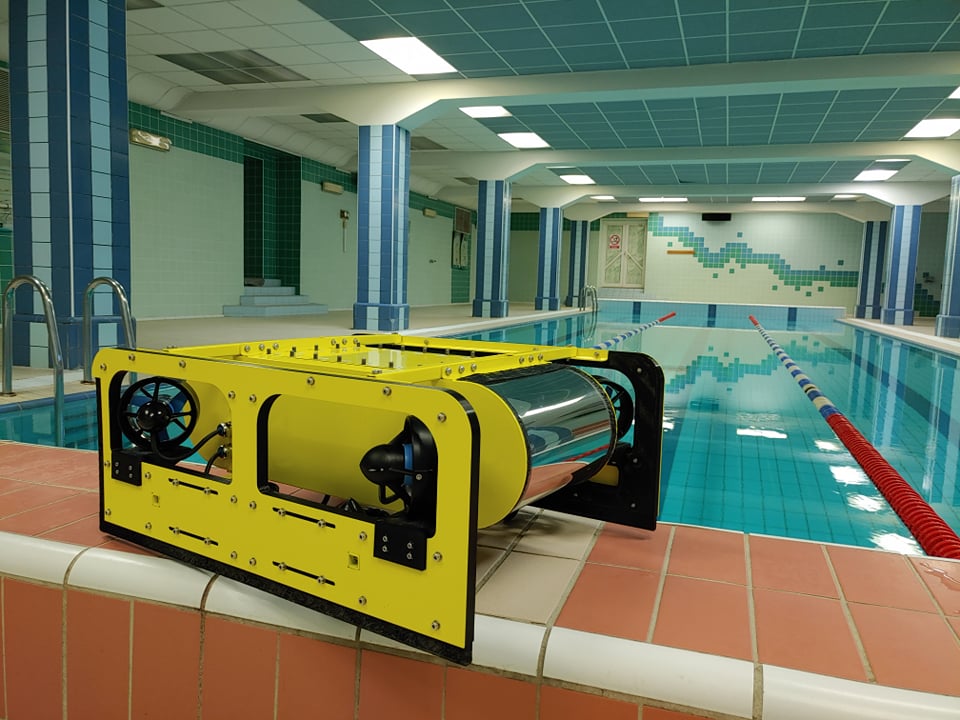
Zwycięstwo w konkursie KOKOS, a także uczestnictwo w kilku wydarzeniach naukowych pozwoliło nam na pozyskanie środków na budowę nowej, lepszej łodzi podwodnej OKOŃ V2. Organizacja pracy przy budowie nowego robota była bardzo trudna z powodów szalejącej pandemii koronawirusa. Z tego powodu nie mogliśmy wspólnie pracować w laboratoriach naszego koła naukowego czy innych laboratoriach Politechniki Warszawskiej. Wszystko musieliśmy wykonywać samodzielnie we własnych domach, co znacząco wpłynęło na tempo rozwoju. Najszybciej i najlepiej w tym czasie rozwijał się symulator, który od razu stał się potężnym narzędziem w rękach naszych programistów. Środowisko symulacyjne pozwalało na uruchomienie systemu robota na komputerach osobistych członków naszego zespołu bez fizycznego dostępu do robota. W ten sposób pion informatyczny mógł pracować bez żadnych przeszkód nad rozwojem autonomii i udoskonalaniem algorytmów rozpoznawania obiektów pod wodą. Gdy obostrzenia związane z chorobą COVID-19 nieznacznie zelżały wróciliśmy do warsztatu, by powoli składać nowego robota. W tym czasie ponownie zgłosiliśmy nasz projekt w Konkursie Konstrukcji Studenckich, ponieważ były to jedyne zawody, na jakie mogliśmy liczyć w najbliższym czasie. Tym razem wystartowaliśmy w kategorii JOKER. Kategoria ta stworzona została z myślą o wszystkich nietuzinkowych konstrukcjach, które nie mieściły się w kanonach pozostałych kategorii. Z racji tego, że nowy robot jeszcze nie był w pełni gotowy do pracy uznaliśmy, że naszym JOKER-em będzie wspominany wcześniej symulator, oraz zestaw algorytmów, które opracowaliśmy do OKONIA V2. I tym razem znowu sięgnęliśmy po zwycięską statuetkę, a jury pochwaliło nasz zespół za elastyczność i umiejętność dostosowania środowiska pracy do niekorzystnych warunków. Film konkursowy przedstawiający nowego robota i symulator znajdziecie poniżej.
Robot OKOŃ V2 dalej był rozwijany aż do roku 2023. Prace zaprzestano ze względu na braki w finansowaniu (części do takiego robota, jak również same zawody są bardzo kosztowne), a także z powodu ukończenia studiów znacznej części członków zespołu. Zaś symulator do dziś stanowi w pełni funkcjonalne narzędzie, które umożliwia rozwijanie algorytmów sterowania, stabilizacji, autopilotażu oraz generowania danych do nauki sieci neuronowych bez konieczności wychodzenia z domu czy wchodzenia do wody. Kilka ujęć robota w wersji V1, jak również w nowszej odsłonie V2 znajdziecie w naszej galerii zdjęć.