Dokumentacja techniczna VTOL-a
1. Cel i założenia projektowe
1.1 Cel
Statek powietrzny w konfiguracji Tilt-Rotor posiada cztery silniki, które pochylają się do przodu co zapewnia jemu poziomą składową siły ciągu. Samolot taki zyskuje wiele pozytywnych cech – między innymi może rozwijać dużo większe prędkości lotu ze względu na udział czterech zespołów napędowych w generowaniu siły ciągu. Ponadto zwiększona liczba zmiennych sterujących pozwala na uzyskanie lepszych rezultatów pod względem jakości sterowania przy zastosowaniu odpowiednio zaawansowanych algorytmów regulacji. 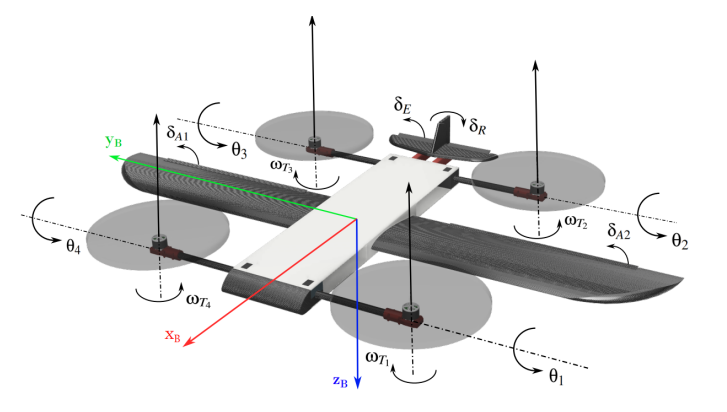
1.2 Założenia projektowe
- BSP o masie własnej do 5kg oraz udźwigu 2kg
- Możliwość w trybach lotu manualnym oraz automatycznym, gdzie przejście z lotu w zawisie do lotu poziomego dzieje się bez zewnętrznej interakcji.
- Zasięg w trybie płatowca do 50km.
- Długotrwałość lotu w trybie płatowca do 45 min przy prędkości przelotowej.
- Prędkość przelotowa 30 m/s.
2. Wykaz podsystemów i użytych elementów
2.1 Sekcja Awioniki
- Kontroler lotu The Orange Cube + with Carrier Board
- Komputer pokładowy nr 1 (prototyp) Raspberry Pi 5 16GB https://botland.com.pl/moduly-i-zestawy-raspberry-pi-5/25860-raspberry-pi-5-16gb-html
- Komputer pokładowy nr 2 (docelowy) Jetson Orin Nano 8GB https://kamami.pl/zestawy-deweloperskie-jetson/1184505-nvidia-jetson-orin-nano-8ghtml
- Iterfejs DroneCAN Matek CAN Node G474 https://rcmaniak.pl/pl/p/MATEk-AP_Periph-CAN-Node-CAN-G474/5808
- Odbiornik radiowy (prototyp) FrSky R-XSR https://dronavista.pl/pl/akcesoria/6558-frsky-r-xsr-odbiornik-z-telemetria. html
- Odbiornik telemetrii (prototyp) SiK Radio v3 https://holybro.com/products/sik-telemetry-radio-v3
- Odbiornik radiowy, obrazu i telemetrii (docelowy) Herelink Air Unit https://irlock.com/products/herelink-air-unit
2.2 Sekcja Zasilania
- Akumulator LiPo 6S Tatuu 6S 6000mAh https://rcmaniak.pl/pl/p/Tattu-G-Tech-6000mah-22.2V-150C-Lipo-Battery-with-AS150-5946 6
- ESC 4in1 Speedybee 60A 30x30 https://rcmaniak.pl/pl/p/SpeedyBee-BLS-60A-30x30-ESC/5706
- Przetwornice DC-DC/BEC Matek UBEC DUO 4A-12V i 4A-5V https://rcmaniak.pl/pl/p/Matek-UBEC-DUO-4A-12V-4A-5V/4493
2.3 Sekcja Sensorów i Układów Pomiarowych
- Moduł GPS ProfiCNC Here 4 Multiband DroneCAN RTK GNSS https://www.drony.net/proficnc-hex-here4-multiband-rtk-gnss.html
- Moduł Pitot MATEK ASPD-DLVR UAVCAN Pitot Sensor https://www.nobshop.pl/matek-aspd-dlvr-i2c-uavcan-cyfrowy-czujnik-predkosci-rurkahtml
- Power Module Mini Power Brick https://rcdrone.top/pl/products/hex-hexing-pixhawk2-power-module-asrsltid=AfmBOopVEx3vNzxT-EvwA7AMXpH3yzNqaYft8UvfNdYA1pa2ClldmSb2
2.4 Sekcja Napędów
- Serwomechanizm MG995 https://botland.com.pl/serwa-typu-standard/817-serwo-towerpro-mg-995-standard-5904422329723.html
- Silnik bezszczotkowy T-MOTORHOBBY VELOX VICTORY V3008 1350KV https://www.tmotorhobby.com/goods-1198-TMOTOR++VELOX+VICTORY+V3008+CINEMATIC+FPV+DRONE+MOTOR+-+1350KV.html
- Regulator prędkości obrotowej PULS 100A ESC ????
2.5 Sekcja Konstrukcyjna
2.6 Sekcja Modułu Recovery